论文简介
- 地址:https://arxiv.org/abs/1703.06870
- 基于之前two stage的fasterRCNN的目标检测方法,添加了mask refinement的branch,完成了实例分割的任务。
- 在其他任务上,如姿态估计等,都做了实验,实验证明有提出的maskRCNN方法有很好的泛化性能。
- maskRCNN可以跑到5fps。
introduction
- 在之前的fasterRCNN系列中,使用
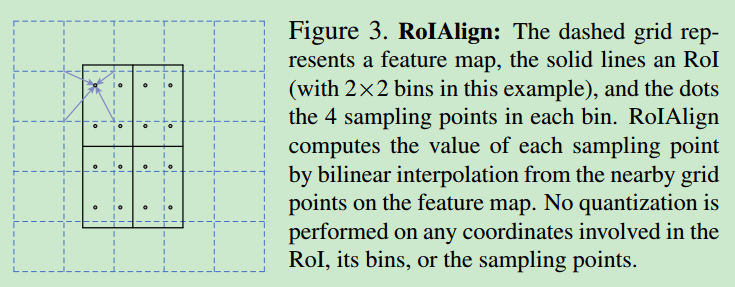
RoiPooling将roi变成相同大小的feature map,是对其使用向下取整,如果在实例分割也这样的话,会大大降低像素点的定位精度,因此使用RoiAlign的方法,结合双线性插值进行pooling,得到相同大小的feature map。 - 之前的预测过程中,对于多分类的问题,使用softmax对最后一层feature map进行处理,并使用softmax loss进行BP。但是这种方法会使得像素之间的各个类别形成竞争,因此在本文中使用multiple sigmoid的方法,对于每个类别都是用sigmoid进行处理,避免类别之间竞争的问题,实验证明这种方法可以提升模型的精度。
mask RCNN
- loss function是
$$L = L_{cls} + L_{box} + L_{mask}$$
其中$L_{cls}$与$L_{box}$在fastRCNN中已有定义,$L_{mask}$就是上面提到的mask的loss。
- roialign的示意图如下
- 网络结构如下
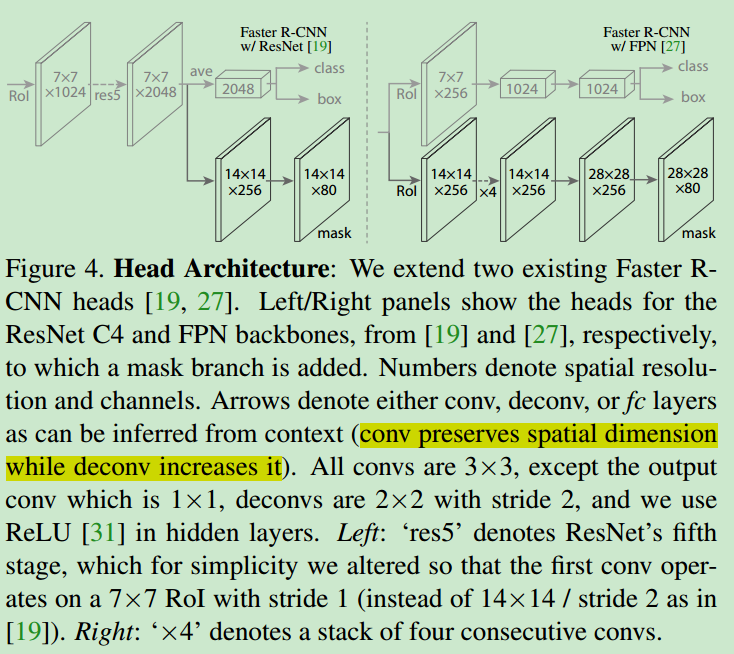
前端的网络使用resnet或者fpn均做了测试,这里也使用了转置卷积,提升高维feature map在mask预测时的size。
在训练的过程中
- 只有那些被标注为positive roi(与gt box的IOU大于特定阈值)的bbox才会对最终的$L_{mask}$做出贡献。
- 这里每个点生成了5(scales)X3(aspect ratios)=15个proposal。
- 去掉很多负样本,使得正负样本的比例在
1:3左右。
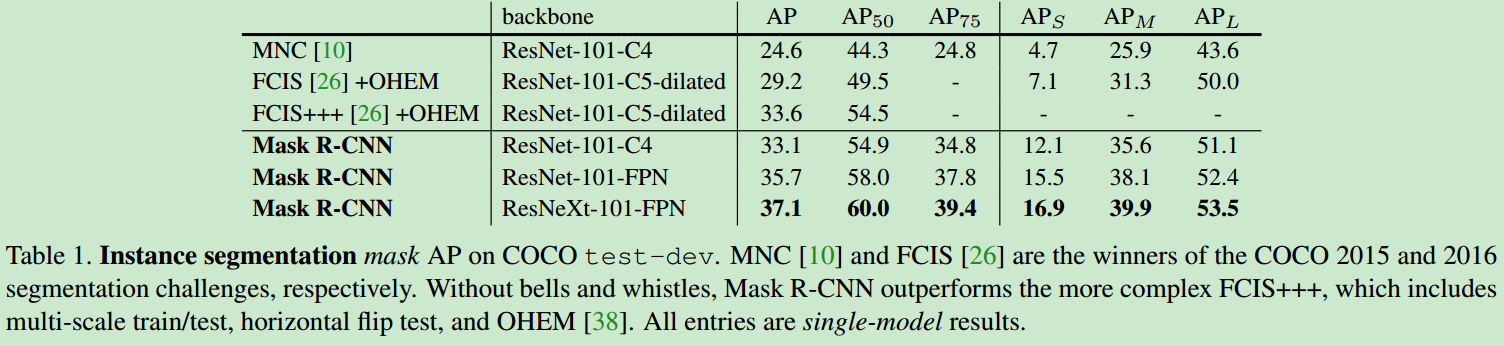
在不加任何其他的技巧的情况下,秒杀同时期其他
single stage的实例分割方法。贴一张模型的性能。
conclusion
- 在实例分割、物体检测、姿态估计、关键点检测等任务中都达到了state-of-art的水准,也证明了maskRCNN的通用性。
关于代码的讲解
参考链接
- 关于maskRCNN的代码有较多版本,这里给一个比较流行的版本(涉及到的代码文件较少,方便研究)。代码链接:https://github.com/matterport/Mask_RCNN
论文中的疑问
在groundtruth中,每个bbox的大小不一定与feature map最终输出的大小相同,因此在训练的时候,将groudtruth的mask以及对应的bbox使用双线性插值resize到CNN输出的mask的大小,之后再将其四舍五入到0,1即可。在utils.py中有一个函数用于实现这个功能。
def minimize_mask(bbox, mask, mini_shape): """Resize masks to a smaller version to reduce memory load. Mini-masks can be resized back to image scale using expand_masks() See inspect_data.ipynb notebook for more details. """ mini_mask = np.zeros(mini_shape + (mask.shape[-1],), dtype=bool) for i in range(mask.shape[-1]): # Pick slice and cast to bool in case load_mask() returned wrong dtype m = mask[:, :, i].astype(bool) y1, x1, y2, x2 = bbox[i][:4] m = m[y1:y2, x1:x2] if m.size == 0: raise Exception("Invalid bounding box with area of zero") # Resize with bilinear interpolation m = skimage.transform.resize(m, mini_shape, order=1, mode="constant") mini_mask[:, :, i] = np.around(m).astype(np.bool) return mini_mask
在输出的时候,模型输出的mask是
28X28或者56X56的大小(根据配置文件中的设定),同时可以得到bbox信息(包含whxy信息),因此在处理的时候,将得到的mask进行resize,变成与bbox的大小相同,最后得到基于bbox的mask信息。utils.py中的unmold_mask函数完成这样的功能,具体代码如下:def unmold_mask(mask, bbox, image_shape): """Converts a mask generated by the neural network to a format similar to its original shape. mask: [height, width] of type float. A small, typically 28x28 mask. bbox: [y1, x1, y2, x2]. The box to fit the mask in. Returns a binary mask with the same size as the original image. """ threshold = 0.5 y1, x1, y2, x2 = bbox mask = skimage.transform.resize(mask, (y2 - y1, x2 - x1), order=1, mode="constant") mask = np.where(mask >= threshold, 1, 0).astype(np.bool) # Put the mask in the right location. full_mask = np.zeros(image_shape[:2], dtype=np.bool) full_mask[y1:y2, x1:x2] = mask return full_mask